A Proposal of FPGA-based Low Cost and Power Efficient Autonomous Fruit Harvester
Published in 2020 The 6th International Conference on Control, Automation and Robotics, 2020
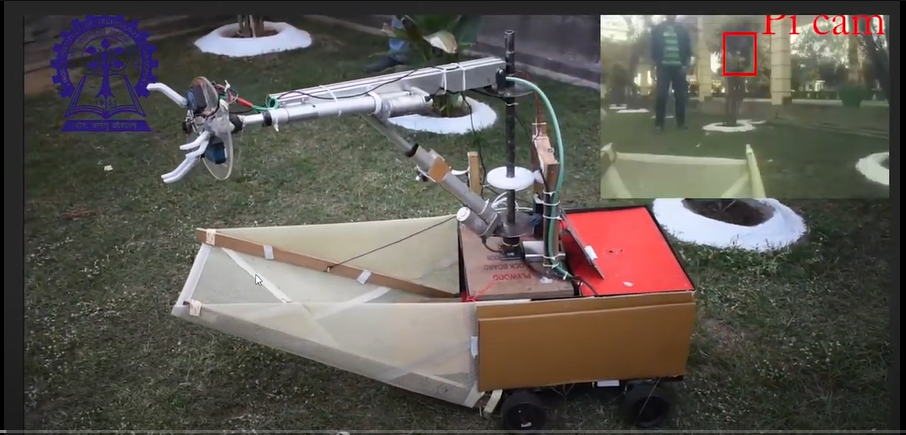
Fruit Plucking is performed using an end effector, and 3-degree of freedom(DOF) arm (made out of the integration of two linear actuators and a rotating platform) consolidated with a 4-wheeled differential drive mobile platform. Effective implementation of the visual processing is executed on the FPGA Fabric of the Xilinx PYNQ-Z2 Board, which accelerates Deep Neural Networks (DNNs) with improved Latency and Energy Efficiency as compared to a CPU or GPU based implementation.